Human/Zombie Vehicle (HZV)
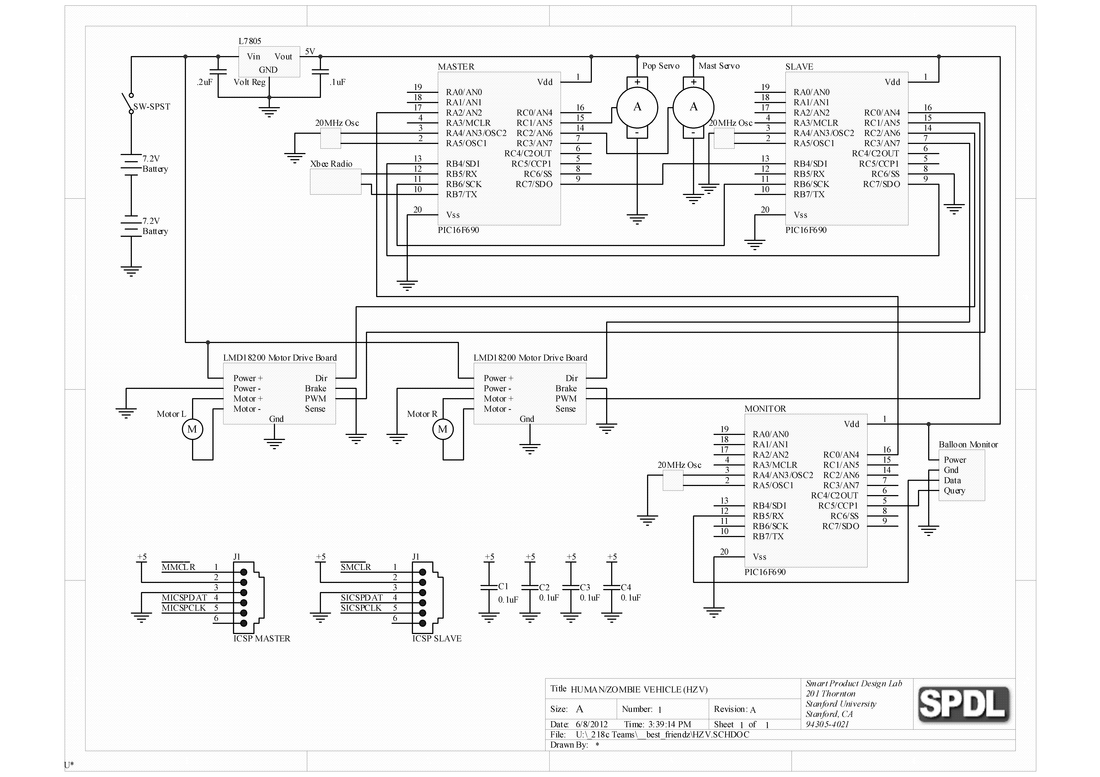
The HZV electronics receive control data from the LUC over Zigbee, parse the data, and control the motors and servos of the vehicle. The Master PIC is in charge of the servos through software PWM, as well as receiving the radio messages, monitoring a balloon status pin, and sending out appropriate SPI data to the Slave PIC. The Slave PIC receives the data through SPI and is responsible for the driving and turning action of the HZV through LMD18200 H-bridge drivers driving our propulsion motors. A Monitor PIC queries the provided Balloon Monitor and receives the data through the UART, and sets an output pin connected to the Master depending on whether or not the balloon has been popped.
The software protocol implemented provides for verification of the link between this HZV and a controller.
The software protocol implemented provides for verification of the link between this HZV and a controller.
| schematichzv.pdf |
